Sig Rascal 110 #2 Results
Sig Rascal 110 #2 – UMN UAV Project

IMG_4073 Purchased August 24, 2005.
This is the second Rascal 110 purchased by this project. It comes with a Zenoah G26 gas 2-stroke ignition engine. The engine seems to be a very nice match for the aircraft. With an 18×8 prop, it will idle at about 1800-2000 rpm and tops out at about 7000 rpm. This isn’t quite the 10k rpm that our OS 1.60FX would turn (with the same prop) on our first Rascal, but it is more than enough power for this aircraft.
October 25, 2006.
Pictures from our morning at Jensen field. We were flight testing to collect data from our 3-gps carrier phase differential attitude determination system.
Warmups on the ground …

IMG_4070

IMG_4071
Fly by’s …

IMG_4072

IMG_4074

IMG_4077
IMG_4073
Landing approaches …

IMG_4083

IMG_4084

IMG_4079

IMG_4081

IMG_4088
Some of the ground crew helping out …

IMG_4080
Taxiing …

IMG_4082

IMG_4086
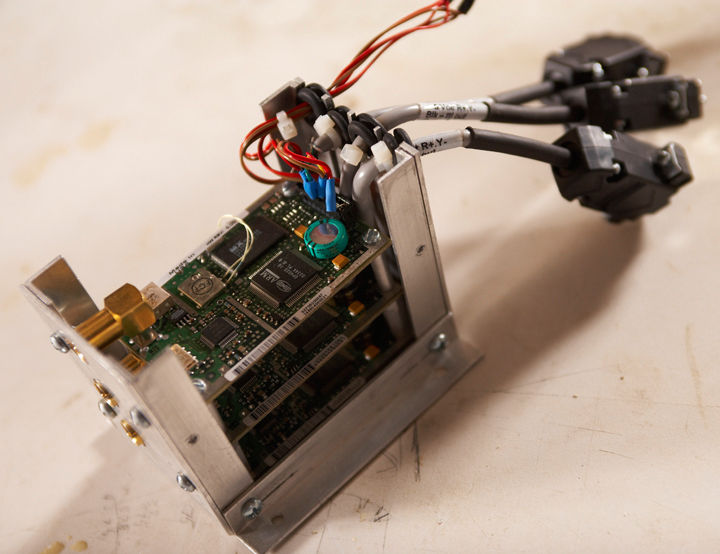
Closeups of the instrumentation …

IMG_4090

IMG_4091

IMG_4092
Detail of one of the wing gps antennas mounted internally …

IMG_4093
Overview of the airframe …

IMG_4094

IMG_4095
July 11, 2006.
Here is an article written about our project:
Here are the raw (color) photos.

XE3C1998
XE3C2033
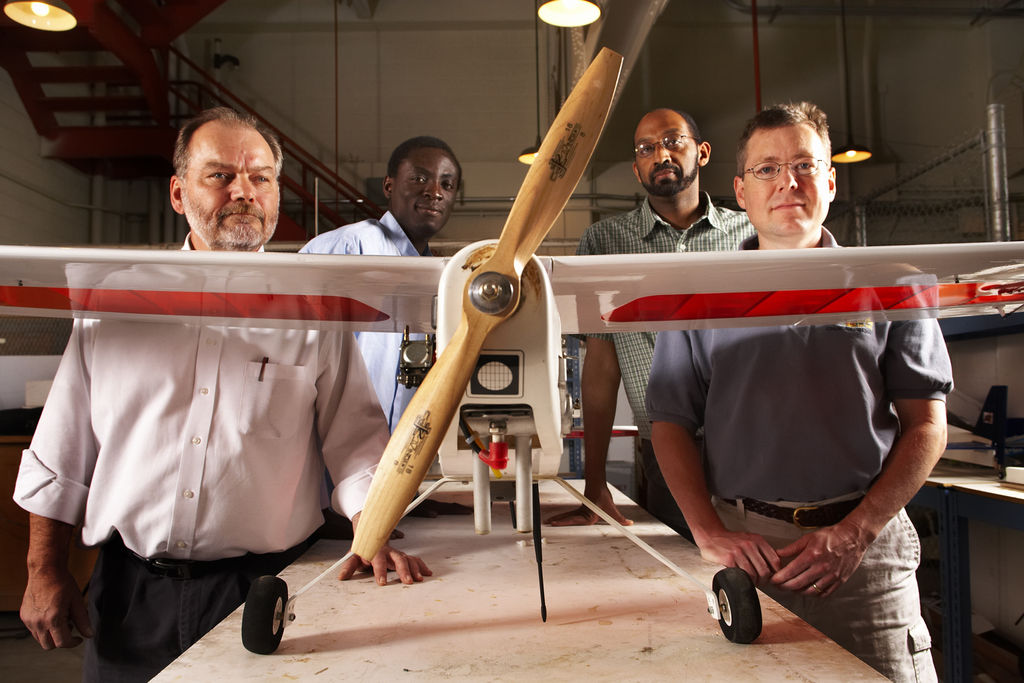
XE3C2071
May 31, 2006.
Today was a beautiful day. Temps in the upper 70’s. Wind about 5mph out of the N and NE. Our mission for today was to collect good MIDG data. We have had problems with our aerocomm radio modem link so Greg rigged up a little gumstix unit to record the data directly on board. We lose our real time link for this, but we get solid data with no drop outs. We want solid data for another little adventure.
This was our first outing of the season. We put in two flights today and the Rascal flew beautifully. The engine ran great and was rock solid. I even spotted my landings on the runway, although with the extra weight, she rolled out a little long onto the grassy area which is no big deal. The Rascal handles mowed grass with no problems.
Here are a couple new pictures of the Rascal with Greg and I.

img_3779

img_3781

img_3784
December 12, 2005.
Movie time.
Here’s a word of explanation. On 10/26/05 we did a test flight and captured the live video stream from the onboard camera as well as the data stream from the onboard IMU/GPS/INS unit. (See the entry for 10/26 below.) We replayed the data stream in FlightGear with overlayed instruments (this can also be done in real time as the data is captured) and saved that out as a movie. Then we edited the two streams together in two different ways: side by side, and blended overlay. The result is interesting. You can see at the start of the flight where the IMU was pretty far out of whack … as much as 5-20 degrees off in yaw. But as the flight progresses you can see the error diminish and later in the flight the match can be quite good.
Both videos are about 50Mb to download. You will need DivX6 to play them. Linux or open source people might find they can play these with xine or mplayer. Windows people might need to go download the DivX6 runtime codec from http://www.free-codecs.com/download/DivX6.htm.
Blended Overlay
Side by Side
November 30, 2005.
Minnesota! This here is what we live for! We put up with above freezing temps, oppressively humid summers, terrible mosquitos for a few months of the year, and high taxes, but days like today are the payoff: Standing outside in +20F temps (and often colder) freezing our butts off or playing hockey, or both. 🙂
Today we flew Rascal #2 at Jenson field. Temps were about +20F. Winds were some where between calm and very light. We probably had about 2″ of snow on the ground … right on the borderline for operating with wheels. The first takeoff run was a little “S” shaped and we had one nose over on a landing (zero damage) but other than that everything worked fine as I adapted to the conditions. We also tested our new video capture hardware.
Just look at these picts and see what you folks in sunny warm climates are missing out on. Oh yeah, and these pictures look dark for good reason. The sun barely cracks the horizon up here this time of year. And when the sun is up (or not up) it’s usually cloudy.

img_3194

img_3195

img_3196

img_3197
November 11, 2005.
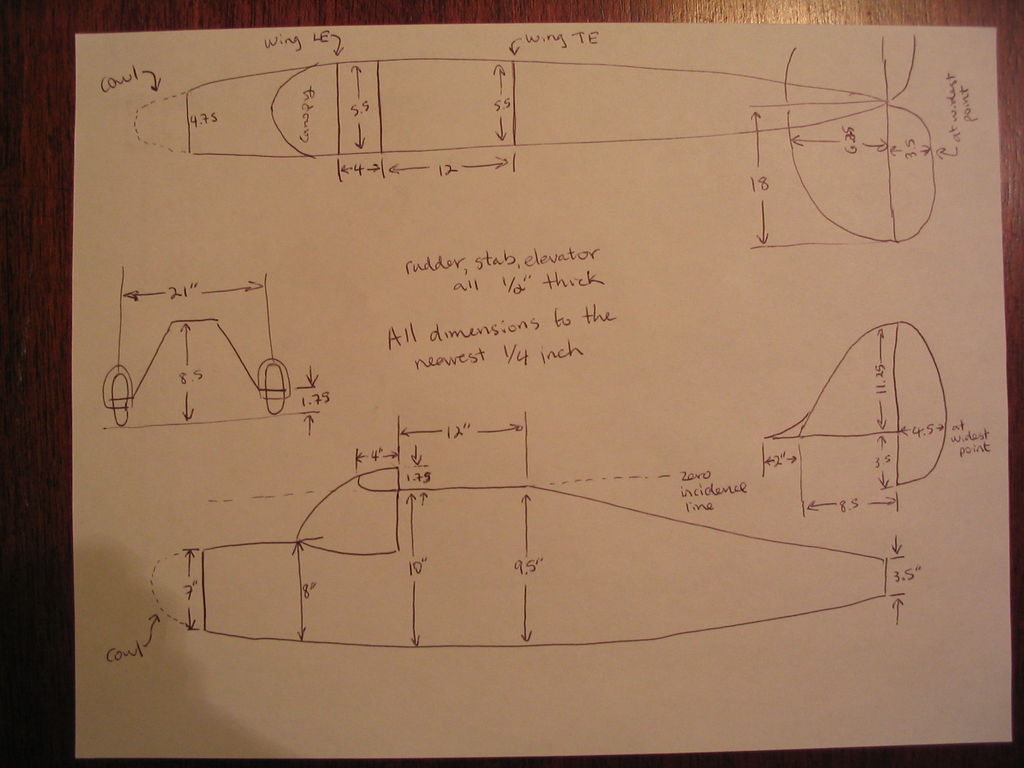
img_3142 Here is a diagram of some of the Rascal 110 dimensions.
October 26, 2005.
Today we flew Rascal #2 at Jensen Field. Weather was perfect, winds were light and out of the east. Our primary goal was to test the live video and live synthetic view right next to each other to verify they track each other as they should since both reflect live data. We also practiced flying over specific objects and buildings to see if we could recognize things from the live video in flight.
Here are two pictures taken nearly at the same time. The first is from the onboard video camera, the second is the FlightGear based synthetic view:

jensen2-vid
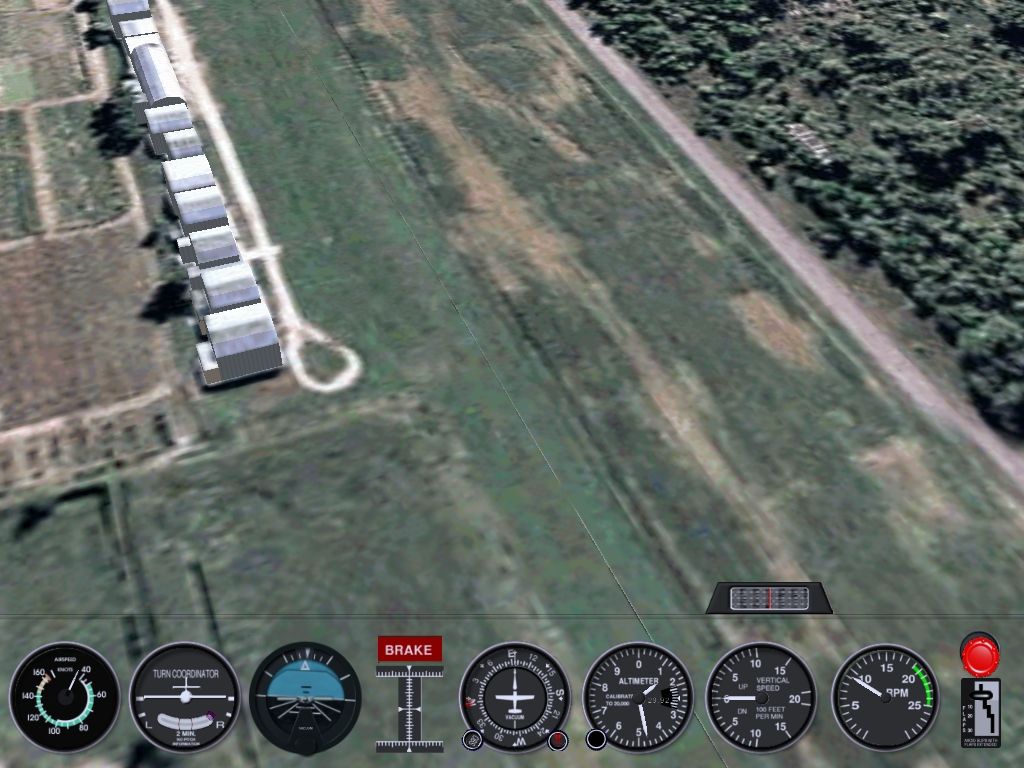
jensen2-synth
October 17, 2005.
Paw and Greg fixed our radio modem / RC system interference problem so now we get excellent range checks. We setup down at “Jensen field” in Rosemount, MN.
Here is a picture of the field and the row of hangars:

img_2977
Our ground station is basically setting up our equipment on a picnic table in the shade:

img_2978

img_2979
Here are some pictures of our aircraft posing:

img_2980

img_2981

img_2982

img_2983

img_2984
Results:
Our wireless video camera refused to work so we flew without that. Our primary objective though was to flight test our “synthetic visual system.” This consists of a MIDG-II IMU/GPS/INS transmitting data to the ground via an aerocom radio modem. On the ground we have some custom software that reads the MIDG-II binary data and sends the results over to FlightGear for real time rendering. Ted built us a “photo-real” model of the area that was compatible with FlightGear.
We were disappointed with the data rate we were getting (maybe 5hz.) This prevented us from doing any serious flying under the hood. But I think we validated our approach and when we track down our data rate issues we will have a very powerful remote piloting tool.
I made a short movie of an approach and touch down. I replayed the data on my laptop so it is smoother than in real time because the replay code can easily interpolate between data points. I pointed my little digital camera at the laptop’s screen and here is the result, low quality, but you can see things in action. Notice the live working instruments at the bottom of the display. We are landing to the west and have a pretty stiff turbulent wind coming from the NW and rolling over the hangers. I’m not showing off my piloting skills here, but the touch down was nice ad gentle. 🙂
Click on the following “text” link to view the movie:
|
MVI_2986 MVI_2986 |
October 3, 2005.
All our instrumentation was moved over to Rascal #2 so today we flew a series of test flights to make sure the plane flew well with it’s payload. We couldn’t pass the range check test with our radio modem on so we scratched our heads for a while, but couldn’t come up with any clever ideas so we unplugged the power and grudgingly continued with no telemetry data.
We were very happy with the aircraft’s performance and handling with the load. We seemed to be getting solid video with our patch antenna. We also wanted to put more time on our buddy box/safety pilot system so we did one flight where we switched off control to each other.
Finally, happy with how everything was working, we walked over to the ground station and took turns flying “under the hood” with video only. Our camera points 45 degrees down which gives a good view of the ground, but not the horizon. We were able to hold a reasonably straight line via video alone, but turns were very difficult because you couldn’t see the horizon to get a good judge of bank angle and pitch angle. This is where the synthetic view would have been really nice … but no telemetry data.
Next up is to figure out our interference problems and get back to where we can fly with telemetry turned on.
September 26, 2005.
Friday and today we have been working on extracting our instrumentation from Rascal #1 and testing it to verify everything still works after our crash. We need to do a bit more testing, but we are reasonably confident at this point that everything survived intact (minus our radio modem which had it’s antenna sheared off.)
Today I continued to modify my MIDG-II replay software so I can read the live incoming data directly from the serial port and pass it to FlightGear. This gives us a live, real time, synthetic view that should match the real aircraft very closely. This should allow us to insert things like restricted airspace, important objects, mission goals, flight route, etc. into the synthetic view. We even have the capability of setting up a virtual ILS for our landing approach. Our sensors are not good enough to allow us to do a full stop landing, but they could assist us in lining up and flying most of the approach.
In addition, the synthetic display can be viewed from inside a live virtual cockpit with working instruments, from a chase plane, or from a tower view. This should be really cool!
September 21, 2005.
After crashing Rascal #1 we decided to take Rascal #2 up for it’s maiden flight. Everything worked great and the plane flies just as beautifully as Rascal #1. I think we get a lower idle and more braking action from the prop on approach, so Rascal #2 is easier to spot in on the landings. Also, there is much more fined grained precision on the low end of the throttle range with the G26 which means a notch up or down of power actually gives you a notch up or down of thrust. This makes controlling the rate of decent on approach work just like the text books say it should. (With smaller glow engines you typically have poor precision on the low end and seem to have not enough or too much power on approach with no fine grained control.)
One small bit of strangeness did occur in our 2nd flight. I think we had the idle set a little too low so when I pulled power for a slow fly by, the engine quit . I was downwind, but way to high to make a good approach to the runway. I kept the wings level and touched down on the extreme far end of our mowed grassy area. I bounced back up and sailed into the farm field (alfalfa???) bounced one more time in the field and the nosed over and went tail high. Zero damage, not a scratch, but it ended up *inches* from where Rascal