Sig Rascal 110 #1 Instrumentation
MicroGear and the Xbow MNAV
March 5, 2007
Paw finalized the RxMux assembly after I verified everything worked. </p>
March 3, 2007
Today I ground tested my RxMux manual override board and everything appeared to work great. </p>
February 20, 2007
Flight testing the MNAV, Stargate, and Maxstream again. </p>

P1010315

P1010316

P1010317

P1010318
In our test last November, we had problems with our gps antenna connection. We made an attempt to fix that issue, but have been waiting through about 40 days of brutally cold weather here in MN to find a flyable day. Finally today the weather and our schedules matched up so we put in 2 very nice test flights.
The MNAV worked well. The secured gps antenna connection held up well though all RPM ranges, taxiing, take offs, landings, and some relatively agressive in flight maneuvers. Everything seemed solid. That is great news because it lets us move on to more interesting things.
In addition to just collecting the data, I fed it into a running copy of FlightGear in real time so you could visualize a synthetic view of the real world flight on the computer. This includes the world position, attitude, and flight surface deflections. It’s very cool to see the virtual view on the computer match exactly what the real world airplane is doing as it happens.
This synthetic view will be useful for a number of things down the road. For example, we can click anywhere in the synthetic view and get back the real lon/lat/elevation of the ground point we clicked on. Now imagine that we have overlaid live video on top of the synthetic view in a way that matches the two views “conformally”.
The synthetic view also gives us the ability to highlight obstacles, restricted airspace, target routes, approach paths, other uav’s in the air, etc.
Takeoff … </p>
Roll … </p>
Fly by … </p>
Loop and Landing … </p>
November 22, 2006
First flight with the MNAV, Stargate, and Maxstream on board
First, no crashes to report!
Here are some observations.
-
We powered everything on and it all worked at the field (including gps.) Then we did a test flight with the MNAV and radio modem *off*. We landed and then powered everything back on to do engine on tests. From that point on … with engine running or not running we were unable to get any gps lock. We were pushed into a corner with battery life so we couldn’t sit around and wait 30 minutes to see if the gps could find itself. So we flew without gps and collected attitude, airspeed, pressure altitude, and transmitter stick inputs; the gps never came to life in flight. Dang, no gps data. 🙁 We need to investigate this further, we don’t think it was an antenna connection issue since we *very* carefully secured that. I’ve observed in the past that the MNAV gps can be a bit persnickety, and the MNAV hides all the nmea strings so we can’t see if the gps is seeing zero satellites (antenna problem?) or seeing a few satellites but is lost and trying to find itself.
-
I was really underwhelmed with battery life for our maxstream radio modems and the MNAV/stargate. We were running standard 9v batteries for the maxstream and a 3.7v lipoly (1320mah) battery for the stargate. We got maybe 20 minutes out of everything before the batteries died. I’d really like a bit longer life for a better safety margin when we fly with the system in the critical control path.
So the two main technical issues for us to iron out are (a) figure out what happened with the gps … probably just needed to let it sit for a while longer to find itself and (b) we need longer battery life for a bit more comfortable safety margins. A 10-15 minute flight with 20 minute total battery life is pushing things a lot tighter than I’m comfortable with.
-
We did collect attitude data. I don’t have a very good sense as to the quality of the attitude data, and without location/gps to go along with it, it doesn’t really make sense to replay it in flightgear as a visual sanity check … that was what I was hoping to do. We don’t have an absolute truth reference, but when you replay the flight you can visually catch a lot of abnormal things that wouldn’t show up in the plots.
-
The pitot tube dynamic pressure system seemed to work and yield plausible results. Top speed for the day with our Rascal 110 was about 90mph. Throttled back cruise was maybe 35-45 mph. Approach speed was about 35 (makes sense since I didn’t change the elevator trim between cruise and approach so speed shouldn’t change too much if I’m flying hands off.) Touch down looked like in the neighborhood of 25 mph. (Units converted from m/s to mph indicated, not knots.) Sense since, not knots … how do I stumble into this clumsy english?
-
static pressure/altitude data seemed plausible. The minimum/ground value for the day was 738, max altitidue was 1230, so we kept it under 500′ AGL. Actual field elevation is close to 900′ so these values weren’t calibrated for local weather conditions and that is expected.
-
We updated the demo code to log transmitter stick inputs (and onboard battery voltage) as well. Those seemed pretty good overall, but there are several places where the servo channel data glitched out. The system didn’t register this as a complete transmitter off situation, but the data would get really noisy: 1-3 values at the high end, 1-3 values at the low end, 1-3 correct values, repeat. There is one particular stretch of about 7-8 seconds where the data got *really* noisy and bad. We never flew very far out, so I really didn’t want to see this kind of noise in my data. Makes me very nervous, makes me think that I could easily fly out of range and not be able to recover control in time to save the airplane, if the MNAV is in the critical control path. I didn’t try to fly especially far away, but at the same time we didn’t have gps working so I can’t know what the cutoff range is. We might be able to filter the transmitter data to help things out since there are clearly some good values in the midst of the noise, but still, not what I wanted to see. We’ll need to think very hard about a safe way to proceed. Aside from the one ugly 7-8 second stretch, the other drop outs seemed much more momentary and probably wouldn’t hurt us too bad.
So that’s where we are at. We need to figure out why our gps refused to work. We need to get some bigger capacity batteries. And we need to solve our MNAV interference/range issues before we can proceed on to autonomous flight. </p>
November 18, 2006
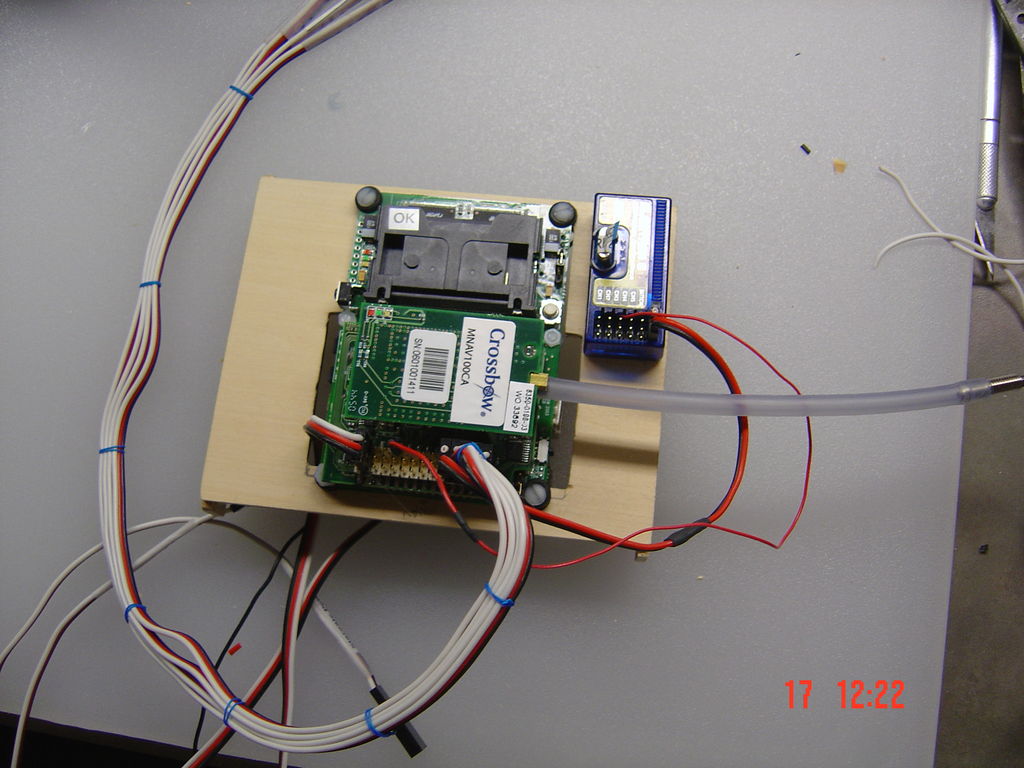
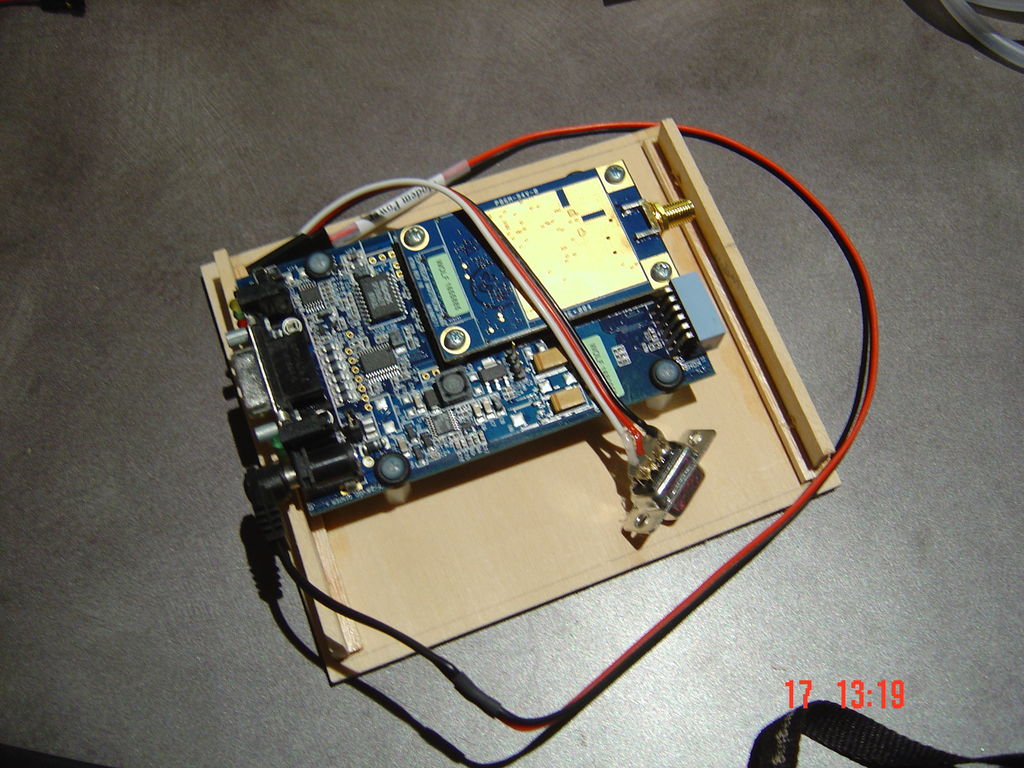
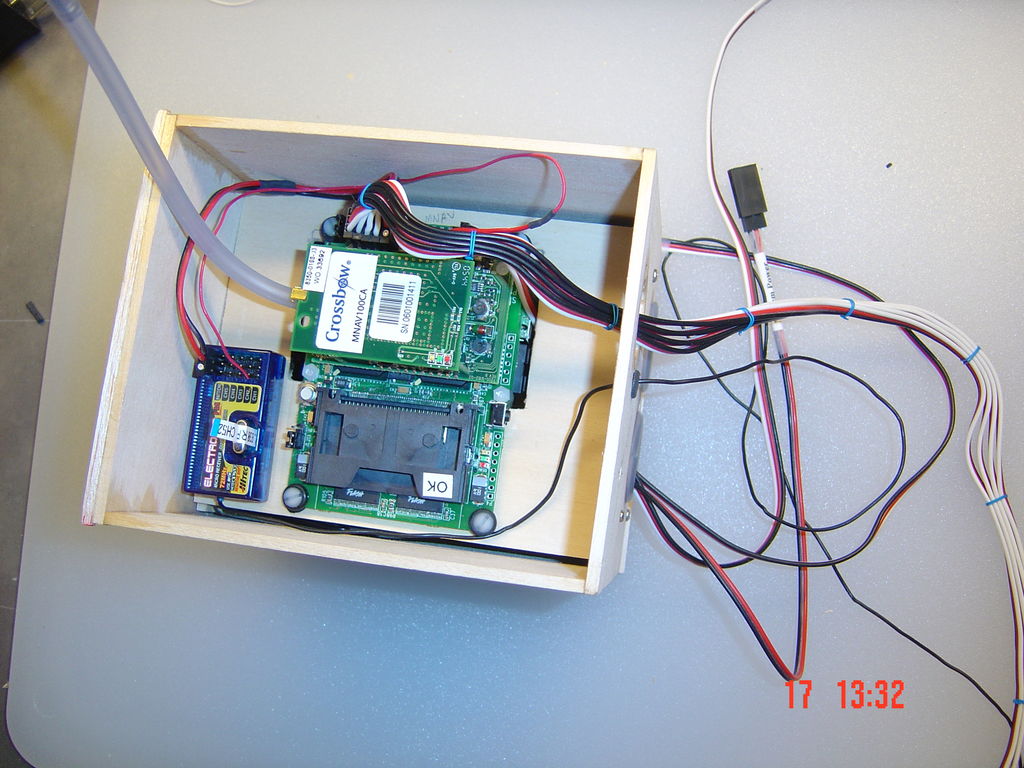
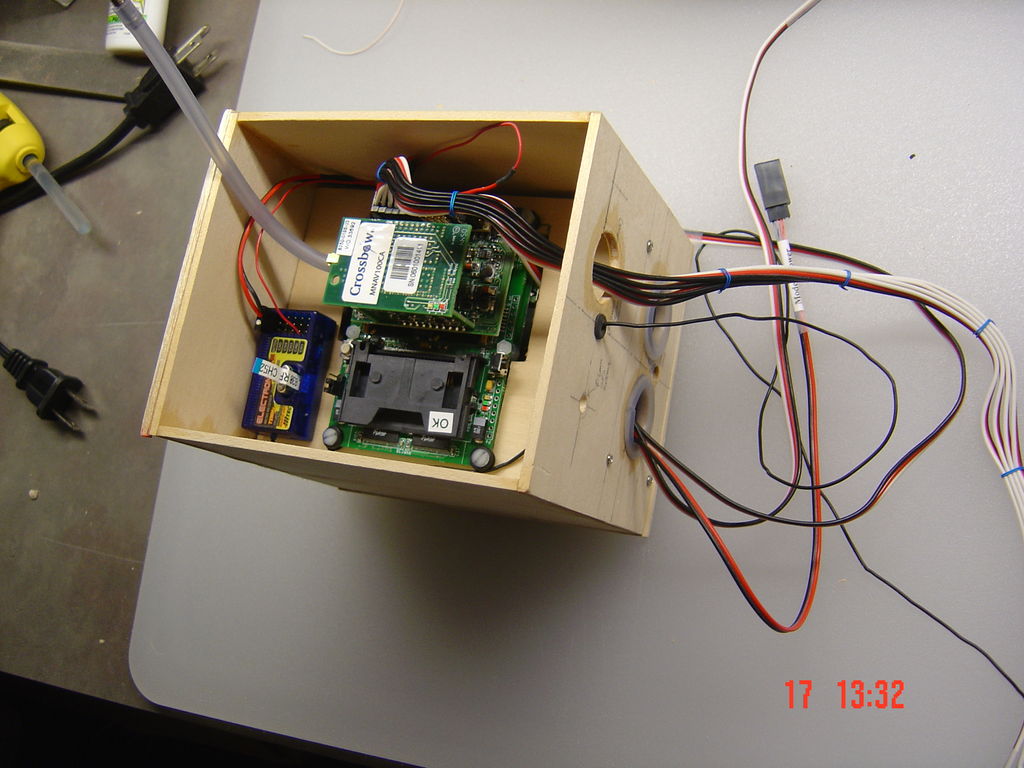
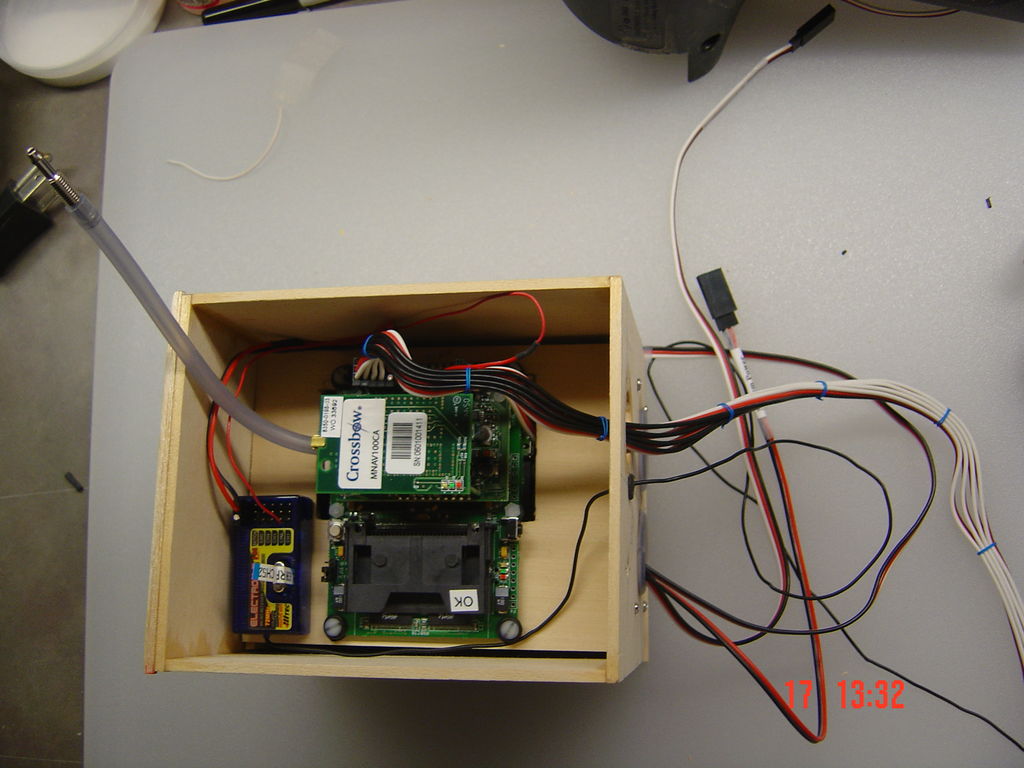
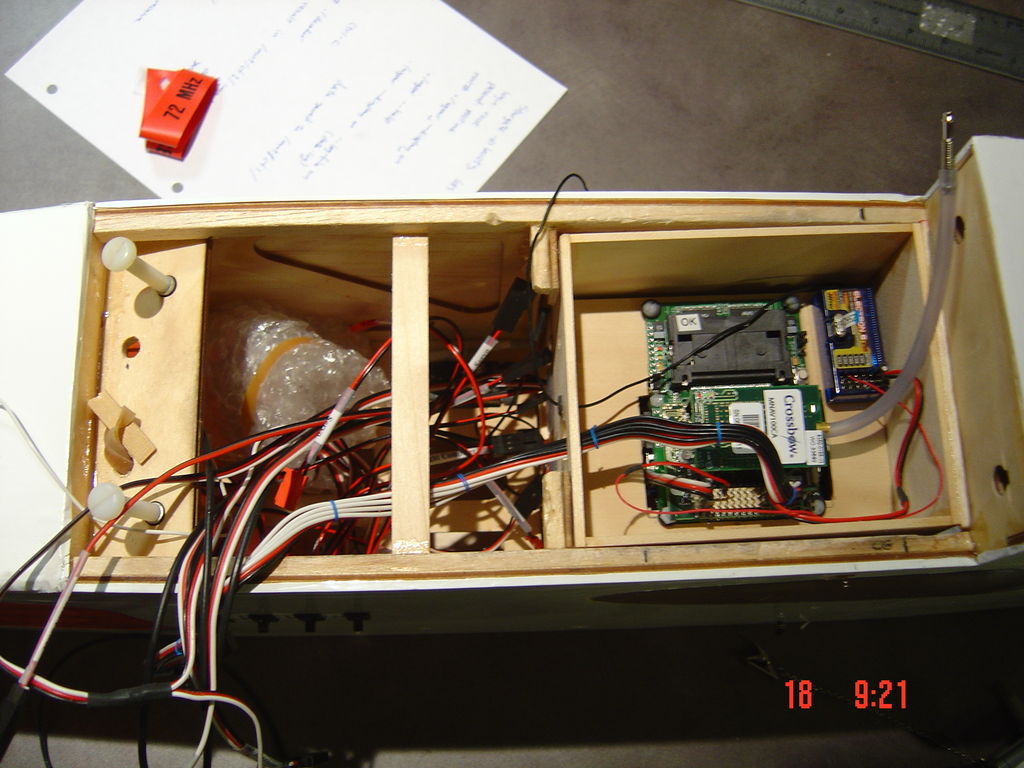
Pictures of the MNAV and StarGate mounting detail </p>

DSC01308

DSC01309

DSC01310

DSC01311

DSC01312
MaxStream Xtend Radio Modem </p>

DSC01313

DSC01314
DSC01315
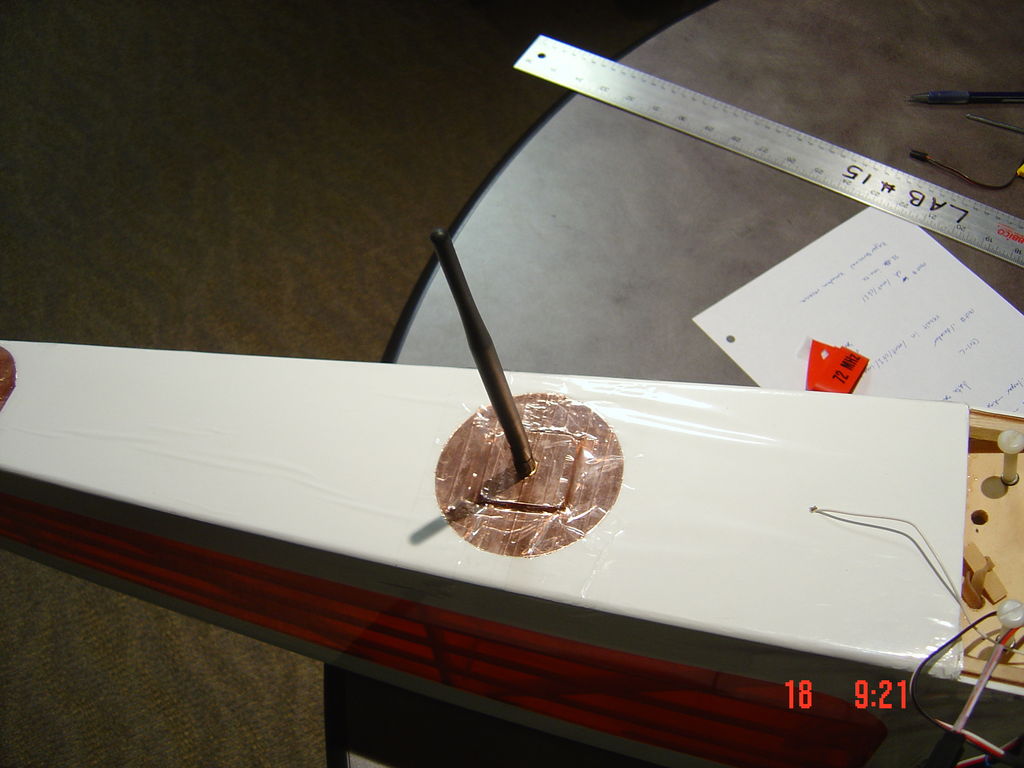
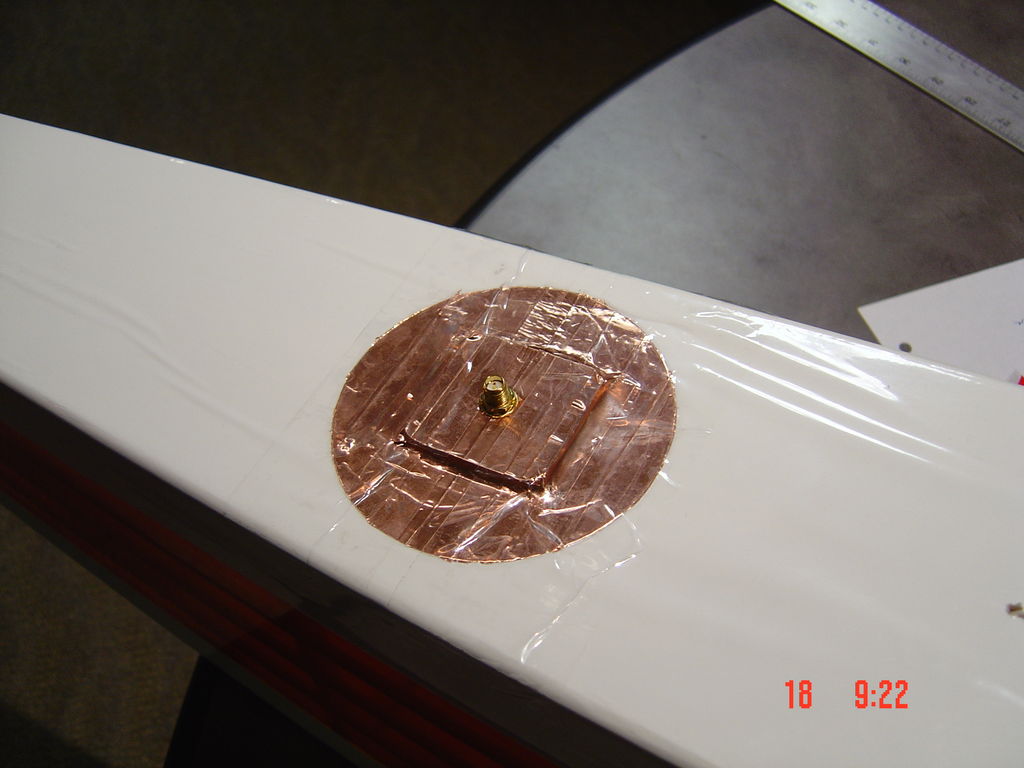
GPS Antenna and Ground Plane </p>

DSC01316

DSC01317
External Power Switches </p>

DSC01318
Adding and Routing the data and power cables </p>
DSC01319
DSC01320
DSC01321
Power and data for the MaxStream radio modem </p>
DSC01322
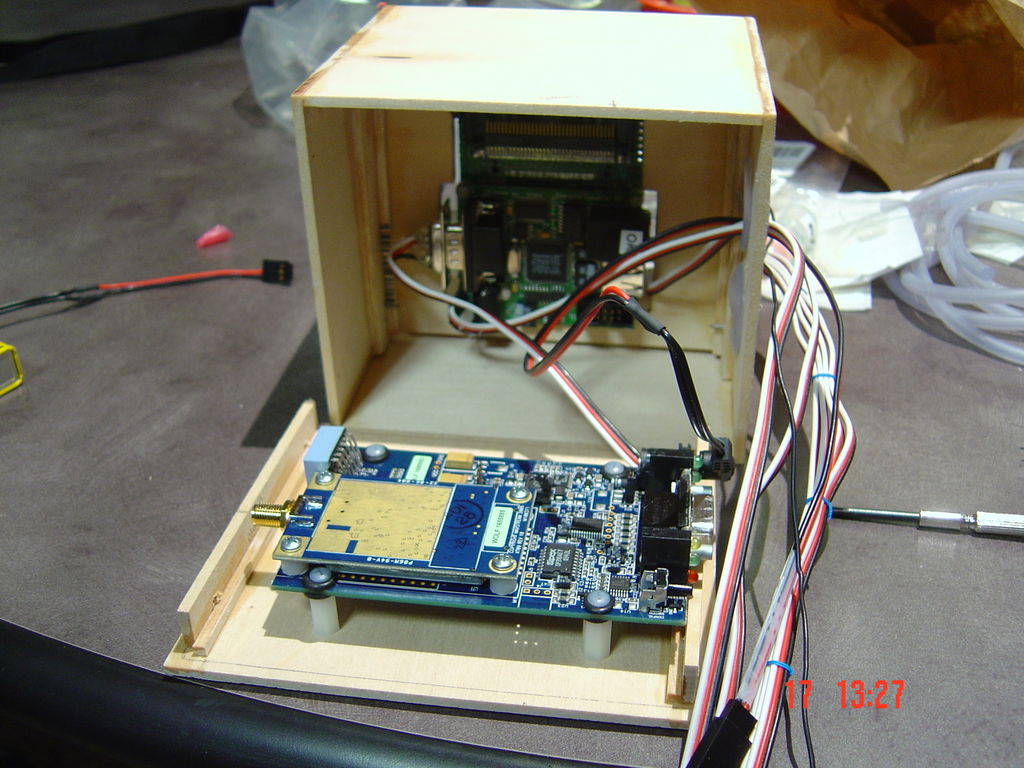
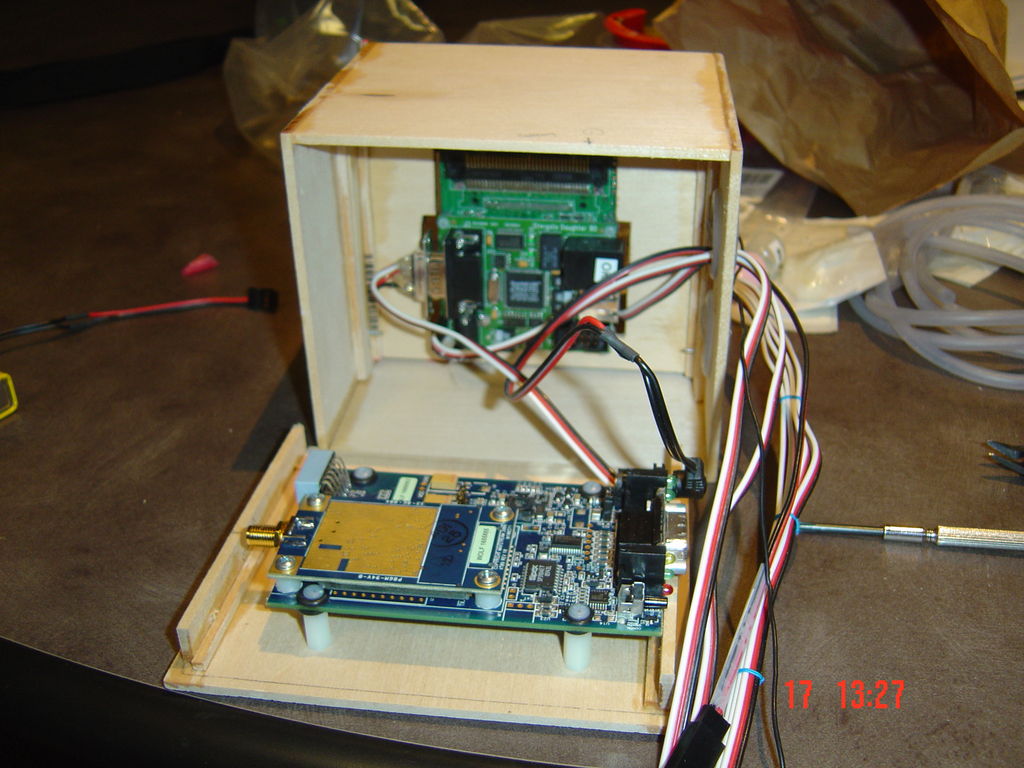
Packaging everything together </p>
DSC01323
DSC01324
DSC01325
DSC01326
DSC01327
DSC01328
Installation in the fuselage </p>
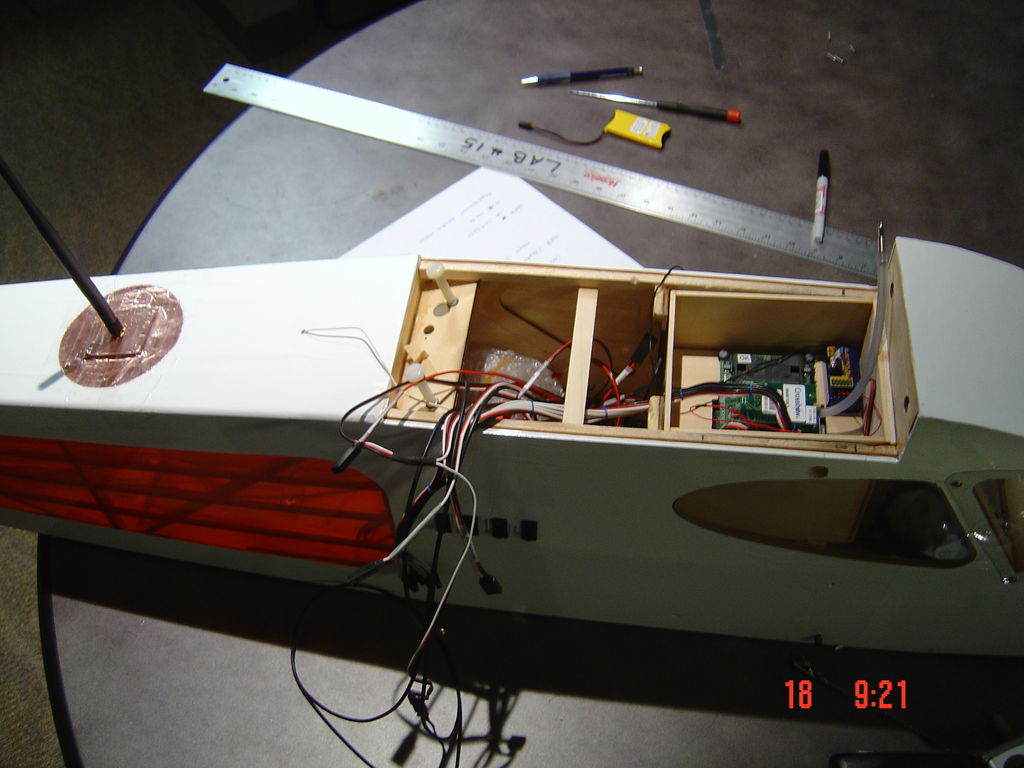
DSC01329
DSC01330
DSC01331
DSC01332

DSC01333

DSC01334 </p>